Um conceito revolucionário de rover para Marte, inspirado em um lagarto do deserto do Saara, está sendo desenvolvido pela Agência Espacial Alemã (DLR). O veículo pode transformar a exploração do planeta vermelho.
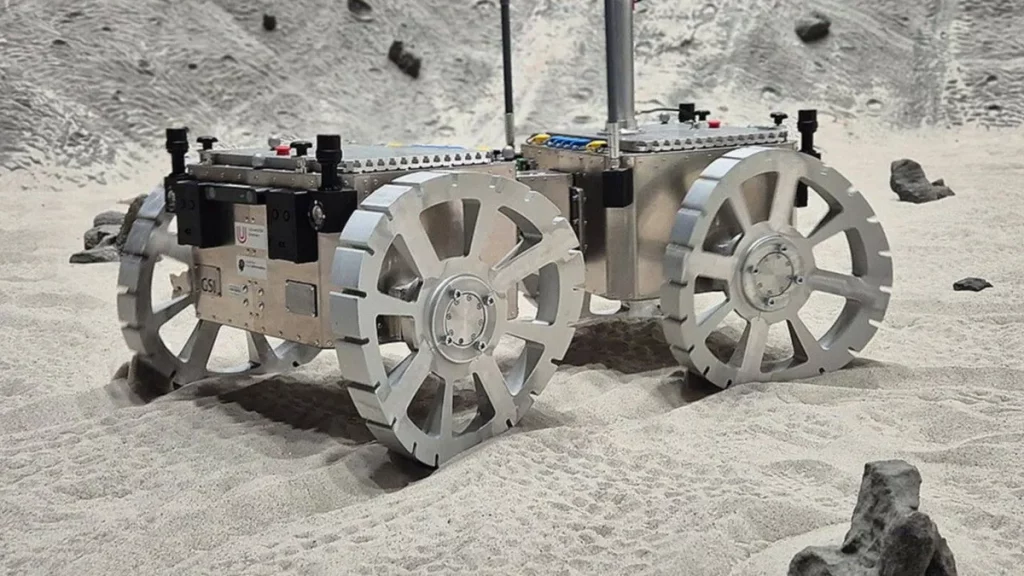
O rover, batizado de Valles Marineris Explorer (VaMEx), utiliza rodas curvas inovadoras que imitam a locomoção do Scincus scincus. O réptil é capaz de literalmente ‘nadar’ sob a areia do deserto.
O projeto VaMEx tem como objetivo criar um enxame autônomo e heterogêneo de robôs para explorar Valles Marineris. O imenso sistema de vales é considerado o ‘Grand Canyon’ de Marte.
Cientistas acreditam que a região pode abrigar vestígios de água líquida em nichos protegidos. Esses ambientes são potencialmente favoráveis à existência de vida.
A topografia acidentada de Valles Marineris sempre representou um desafio extremo para sondas robóticas convencionais. Elas sofrem com terrenos arenosos, cascalho e inclinações acentuadas.
A equipe do VaMEx investiga uma combinação de sistemas de locomoção, como rodas, pernas e voo. Cada tipo de robô contribuirá com suas melhores capacidades na investigação conjunta da região.
O grande diferencial do rover desenvolvido pela Universidade de Würzburg está nas rodas que replicam a mobilidade do lagarto-das-areias. Elas geram forças longitudinais e laterais que deixam rastros sinusoidais no solo.
Segundo reportagem do site Space.com, essa abordagem supera significativamente outras formas de navegação em dunas.
O professor Marco Schmidt, cientista da computação da Universidade de Würzburg, lidera a pesquisa em mobilidade bioinspirada. Sua equipe testou o rover em areia e em terreno aberto, em parceria com o Centro de Pesquisa Alemão para Inteligência Artificial (DFKI) e a Universidade de Bremen.
Os experimentos demonstraram um deslocamento estável na areia. Contudo, também revelaram que melhorias são necessárias, ponto reconhecido por Schmidt.
A equipe da ESSEO planeja expandir sua contribuição para o VaMEx com foco em mobilidade baseada em software. Desenvolverá estratégias de controle que considerem deslizamento, afundamento e interação entre roda e terreno.
Pascal Lee, cientista do Instituto SETI, do Instituto de Marte e do Centro de Pesquisa Ames da NASA, classificou a tecnologia como inovadora. Ele destacou que soluções de mobilidade capazes de atravessar dunas marcianas são cruciais para o futuro da exploração.
A iniciativa alemã ocorre em um momento de intensa competição internacional por soluções robóticas avançadas para Marte. Agências espaciais e empresas privadas miram missões cada vez mais ambiciosas ao planeta vermelho.
A capacidade de vencer terrenos arenosos imprevisíveis pode ser decisiva para acessar regiões ainda inexploradas. Essas áreas permanecem intocadas desde o início da era espacial.
? Inscreva-se na Newsletter de O Cafezinho
Receba nossas análises e as principais notícias diárias do Brasil e do Sul Global.







Nenhum comentário ainda, seja o primeiro!